Filter
Associated Lab
- Branson Lab (4) Apply Branson Lab filter
- Card Lab (5) Apply Card Lab filter
- Dickson Lab (1) Apply Dickson Lab filter
- Funke Lab (1) Apply Funke Lab filter
- Jayaraman Lab (2) Apply Jayaraman Lab filter
- Remove Reiser Lab filter Reiser Lab
- Romani Lab (4) Apply Romani Lab filter
- Rubin Lab (15) Apply Rubin Lab filter
- Stern Lab (1) Apply Stern Lab filter
- Turaga Lab (3) Apply Turaga Lab filter
- Zuker Lab (1) Apply Zuker Lab filter
Associated Project Team
Publication Date
- 2025 (3) Apply 2025 filter
- 2024 (2) Apply 2024 filter
- 2023 (6) Apply 2023 filter
- 2022 (3) Apply 2022 filter
- 2021 (3) Apply 2021 filter
- 2020 (2) Apply 2020 filter
- 2019 (2) Apply 2019 filter
- 2018 (4) Apply 2018 filter
- 2017 (6) Apply 2017 filter
- 2016 (3) Apply 2016 filter
- 2015 (2) Apply 2015 filter
- 2014 (2) Apply 2014 filter
- 2013 (2) Apply 2013 filter
- 2012 (1) Apply 2012 filter
- 2011 (2) Apply 2011 filter
- 2010 (3) Apply 2010 filter
- 2009 (1) Apply 2009 filter
- 2008 (1) Apply 2008 filter
- 2007 (2) Apply 2007 filter
- 2003 (1) Apply 2003 filter
Type of Publication
51 Publications
Showing 41-50 of 51 results
Virtual reality (VR) holds great promise as a tool to study the neural circuitry underlying animal behaviors. Here, we discuss the advantages of VR and the experimental paradigms and technologies that enable closed loop behavioral experiments. We review recent results from VR research in genetic model organisms where the potential combination of rich behaviors, genetic tools and cutting edge neural recording techniques are leading to breakthroughs in our understanding of the neural basis of behavior. We also discuss several key issues to consider when performing VR experiments and provide an outlook for the future of this exciting experimental toolkit.

The ability of insects to learn and navigate to specific locations in the environment has fascinated naturalists for decades. The impressive navigational abilities of ants, bees, wasps and other insects demonstrate that insects are capable of visual place learning, but little is known about the underlying neural circuits that mediate these behaviours. Drosophila melanogaster (common fruit fly) is a powerful model organism for dissecting the neural circuitry underlying complex behaviours, from sensory perception to learning and memory. Drosophila can identify and remember visual features such as size, colour and contour orientation. However, the extent to which they use vision to recall specific locations remains unclear. Here we describe a visual place learning platform and demonstrate that Drosophila are capable of forming and retaining visual place memories to guide selective navigation. By targeted genetic silencing of small subsets of cells in the Drosophila brain, we show that neurons in the ellipsoid body, but not in the mushroom bodies, are necessary for visual place learning. Together, these studies reveal distinct neuroanatomical substrates for spatial versus non-spatial learning, and establish Drosophila as a powerful model for the study of spatial memories.

When the contrast of an image flickers as it moves, humans perceive an illusory reversal in the direction of motion. This classic illusion, called reverse-phi motion, has been well-characterized using psychophysics, and several models have been proposed to account for its effects. Here, we show that Drosophila melanogaster also respond behaviorally to the reverse-phi illusion and that the illusion is present in dendritic calcium signals of motion-sensitive neurons in the fly lobula plate. These results closely match the predictions of the predominant model of fly motion detection. However, high flicker rates cause an inversion of the reverse-phi behavioral response that is also present in calcium signals of lobula plate tangential cell dendrites but not predicted by the model. The fly’s behavioral and neural responses to the reverse-phi illusion reveal unexpected interactions between motion and flicker signals in the fly visual system and suggest that a similar correlation-based mechanism underlies visual motion detection across the animal kingdom.
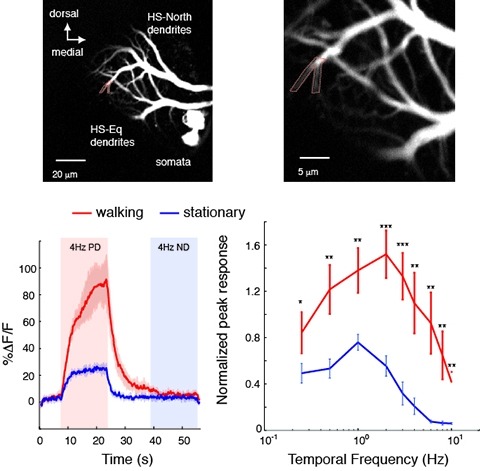
Changes in behavioral state modify neural activity in many systems. In some vertebrates such modulation has been observed and interpreted in the context of attention and sensorimotor coordinate transformations. Here we report state-dependent activity modulations during walking in a visual-motor pathway of Drosophila. We used two-photon imaging to monitor intracellular calcium activity in motion-sensitive lobula plate tangential cells (LPTCs) in head-fixed Drosophila walking on an air-supported ball. Cells of the horizontal system (HS)–a subgroup of LPTCs–showed stronger calcium transients in response to visual motion when flies were walking rather than resting. The amplified responses were also correlated with walking speed. Moreover, HS neurons showed a relatively higher gain in response strength at higher temporal frequencies, and their optimum temporal frequency was shifted toward higher motion speeds. Walking-dependent modulation of HS neurons in the Drosophila visual system may constitute a mechanism to facilitate processing of higher image speeds in behavioral contexts where these speeds of visual motion are relevant for course stabilization.

Drosophila melanogaster is a model organism rich in genetic tools to manipulate and identify neural circuits involved in specific behaviors. Here we present a technique for two-photon calcium imaging in the central brain of head-fixed Drosophila walking on an air-supported ball. The ball’s motion is tracked at high resolution and can be treated as a proxy for the fly’s own movements. We used the genetically encoded calcium sensor, GCaMP3.0, to record from important elements of the motion-processing pathway, the horizontal-system lobula plate tangential cells (LPTCs) in the fly optic lobe. We presented motion stimuli to the tethered fly and found that calcium transients in horizontal-system neurons correlated with robust optomotor behavior during walking. Our technique allows both behavior and physiology in identified neurons to be monitored in a genetic model organism with an extensive repertoire of walking behaviors.
Flies, like all animals that depend on vision to navigate through the world, must integrate the optic flow created by self-motion with the images generated by prominent features in their environment. Although much is known about the responses of Drosophila melanogaster to rotating flow fields, their reactions to the more complex patterns of motion that occur as they translate through the world are not well understood. In the present study we explore the interactions between two visual reflexes in Drosophila: object fixation and expansion avoidance. As a fly flies forward, it encounters an expanding visual flow field. However, recent results have demonstrated that Drosophila strongly turn away from patterns of expansion. Given the strength of this reflex, it is difficult to explain how flies make forward progress through a visual landscape. This paradox is partially resolved by the finding reported here that when undergoing flight directed towards a conspicuous object, Drosophila will tolerate a level of expansion that would otherwise induce avoidance. This navigation strategy allows flies to fly straight when orienting towards prominent visual features.
Applying modern machine-vision techniques to the study of animal behavior, two groups developed systems that quantify many aspects of the complex social behaviors of Drosophila melanogaster. These software tools will enable high-throughput screens that seek to uncover the cellular and molecular underpinnings of behavior.
Flying insects exhibit stunning behavioral repertoires that are largely mediated by the visual control of flight. For this reason, presenting a controlled visual environment to tethered insects has been and continues to be a powerful tool for studying the sensory control of complex behaviors. To create an easily controlled, scalable, and customizable visual stimulus, we have designed a modular system, based on panels composed of an 8 x 8 array of individual LEDs, that may be connected together to ’tile’ an experimental environment with controllable displays. The panels have been designed to be extremely bright, with the added flexibility of individual-pixel brightness control, allowing experimentation over a broad range of behaviorally relevant conditions. Patterns to be displayed may be designed using custom software, downloaded to a controller board, and displayed on the individually addressed panels via a rapid communication interface. The panels are controlled by a microprocessor-based display controller which, for most experiments, will not require a computer in the loop, greatly reducing the experimental infrastructure. This technology allows an experimenter to build and program a visual arena with a customized geometry in a matter of hours. To demonstrate the utility of this system, we present results from experiments with tethered Drosophila melanogaster: (1) in a cylindrical arena composed of 44 panels, used to test the contrast dependence of object orientation behavior, and (2) above a 30-panel floor display, used to examine the effects of ground motion on orientation during flight.
It has long been known that many flying insects use visual cues to orient with respect to the wind and to control their groundspeed in the face of varying wind conditions. Much less explored has been the role of mechanosensory cues in orienting insects relative to the ambient air. Here we show that Drosophila melanogaster, magnetically tethered so as to be able to rotate about their yaw axis, are able to detect and orient into a wind, as would be experienced during forward flight. Further, this behavior is velocity dependent and is likely subserved, at least in part, by the Johnston’s organs, chordotonal organs in the antennae also involved in near-field sound detection. These wind-mediated responses may help to explain how flies are able to fly forward despite visual responses that might otherwise inhibit this behavior. Expanding visual stimuli, such as are encountered during forward flight, are the most potent aversive visual cues known for D. melanogaster flying in a tethered paradigm. Accordingly, tethered flies strongly orient towards a focus of contraction, a problematic situation for any animal attempting to fly forward. We show in this study that wind stimuli, transduced via mechanosensory means, can compensate for the aversion to visual expansion and thus may help to explain how these animals are indeed able to maintain forward flight.
Optomotor flight control in houseflies shows bandwidth fractionation such that steering responses to an oscillating large-field rotating panorama peak at low frequency, whereas responses to small-field objects peak at high frequency. In fruit flies, steady-state large-field translation generates steering responses that are three times larger than large-field rotation. Here, we examine the optomotor steering reactions to dynamically oscillating visual stimuli consisting of large-field rotation, large-field expansion, and small-field motion. The results show that, like in larger flies, large-field optomotor steering responses peak at low frequency, whereas small-field responses persist under high frequency conditions. However, in fruit flies large-field expansion elicits higher magnitude and tighter phase-locked optomotor responses than rotation throughout the frequency spectrum, which may suggest a further segregation within the large-field pathway. An analysis of wing beat frequency and amplitude reveals that mechanical power output during flight varies according to the spatial organization and motion dynamics of the visual scene. These results suggest that, like in larger flies, the optomotor control system is organized into parallel large-field and small-field pathways, and extends previous analyses to quantify expansion-sensitivity for steering reflexes and flight power output across the frequency spectrum.